自主空中加油一般包含会合、编队、对接、保持和脱离阶段。其中,对接阶段是任务过程中最关键,也是控制精度要求最高的阶段,通常涉及到密集编队气动耦合干扰、输油装置扰动及系统不确定性等问题,对控制系统设计具有较高挑战性。
近日,为了提高控制系统的抗干扰能力与任务适配性,复旦大学航空航天系艾剑良教授自主飞行与控制团队针对上述问题展开研究。研究人员结合RBF神经网络与传统动态面控制方法,设计了自主空中加油(软式)对接控制系统;并对自主空中加油对接段(图1)的锥套摆动与加油机尾涡干扰进行分析,设计对接参考轨迹,有效改善了对接控制系统的效果。相关论文以“Docking controller for autonomous aerial refueling with adaptive dynamic surface control”为题发表于IEEE Access。
研究人员结合任务特性,对接参考轨迹中加入了锥套运动信息(图2),在动态面控制方法的基础上引入RBF神经网络用于估计系统动力学方程中的不确定性参数,并通过自适应律更新网络的权重函数,以保证RBF神经网络较好地估计系统不确定性参数。通过仿真验证发现,该方法改善了传统动态面方法的控制效果,提高了空中加油对接阶段的跟踪精度(图3)。该项研究对于自主空中加油对接控制系统的设计,提高任务适配性和编队稳定性,降低环境对控制系统的影响具有理论参考价值。

图1.自主空中加油对接示意图
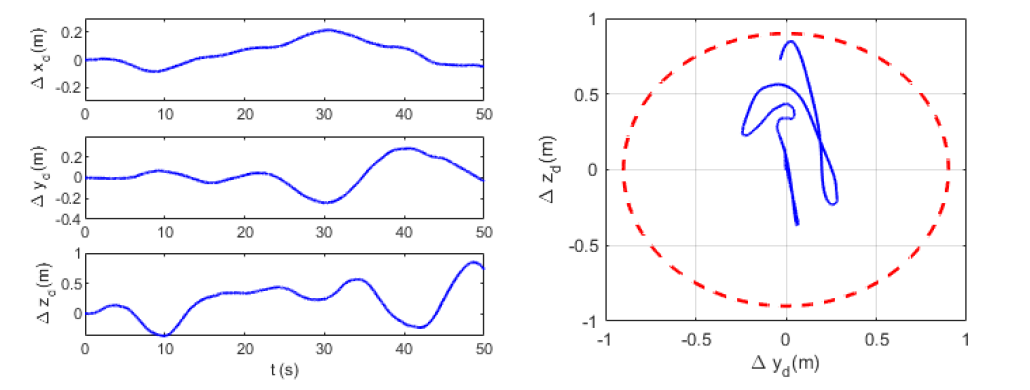
图2.加油锥套的摆动轨迹

图3.不确定性参数与气流干扰下受油机对摆动锥套的捕获轨迹
该研究由复旦大学航空航天系艾剑良教授自主飞行与控制团队完成,参与者有吴加正、罗黄頔博士研究生和艾剑良教授,有关工作获得了国家留学基金委资助。艾剑良教授自主飞行与控制团队主要研究兴趣为无人机集群编队控制、智能化任务分配与航路规划、舰载机自动着舰与容错控制等。