柔性机构普遍存在于航空航天和复杂机械装备产品中,如航空发动机矢量喷管机构、人造卫星伸展机构、机器人柔性机械臂等,如图1所示。柔性机构做往复运动,其工作的可靠性直接影响着机构系统性能和安全性。并且,机构系统由多个柔性杆构成,是多自由度系统,以至于其设计分析具有高非线性和瞬态性,大大增加了柔性机构可靠性评估分析的难度,精度和效率难以满足。
近日,为了解决柔性机构可靠性评估的精度和效率问题,以及有效地进行机构系统的运行和维护,复旦大学航空航天系费成巍课题组提出了基于智能算子的增强型网络学习模型(ENLM)方法,研究成果以“Enhanced network learning model with intelligent operator for the motion reliability evaluation of flexible mechanism”为题发表于航空航天类顶级期刊Aerospace Science and Technology(107:106342)。该方法是在深入研究广义回归神经网络模型(如图2)和对多种群遗传算法改进(如图3)的基础上,融合了极值思想发展而来的。
在ENLM方法中,研究人员将迁移因子引入到多种群遗传算法中,改善多种群遗传算法对优秀(精英)种群选择的有效性。采用极值代理模型的极值思想将柔性机构分析的过程响应简化为响应极值,来处理运动可靠性评估中的瞬态问题;将改进的多种群遗传算法与广义回归神经网络模型方法相结合,对广义神经网络模型进行模型参数寻优,增强广义回归神经网络对高非线性功能的逼近能力,来提高广义回归神经网络模型的建模精度和仿真效率,改善柔性机构运动可靠性评估的有效性。最后,以双连杆柔性机械臂(TFRM)的运动可靠性评估分析为例,如图4和图5所示,对提出方法加以验证。结果显示:ENLM方法能在保证高可靠性度(~0.951)的前提下,使运动可靠性评估的建模精度提高了~3.29%,万次仿真时间节约了~1.19 s,验证了ENLM方法在柔性机构运行可靠性评估中的有效性。

(a)矢量喷管 (b)人造卫星 (c)机器人
图1:柔性机构

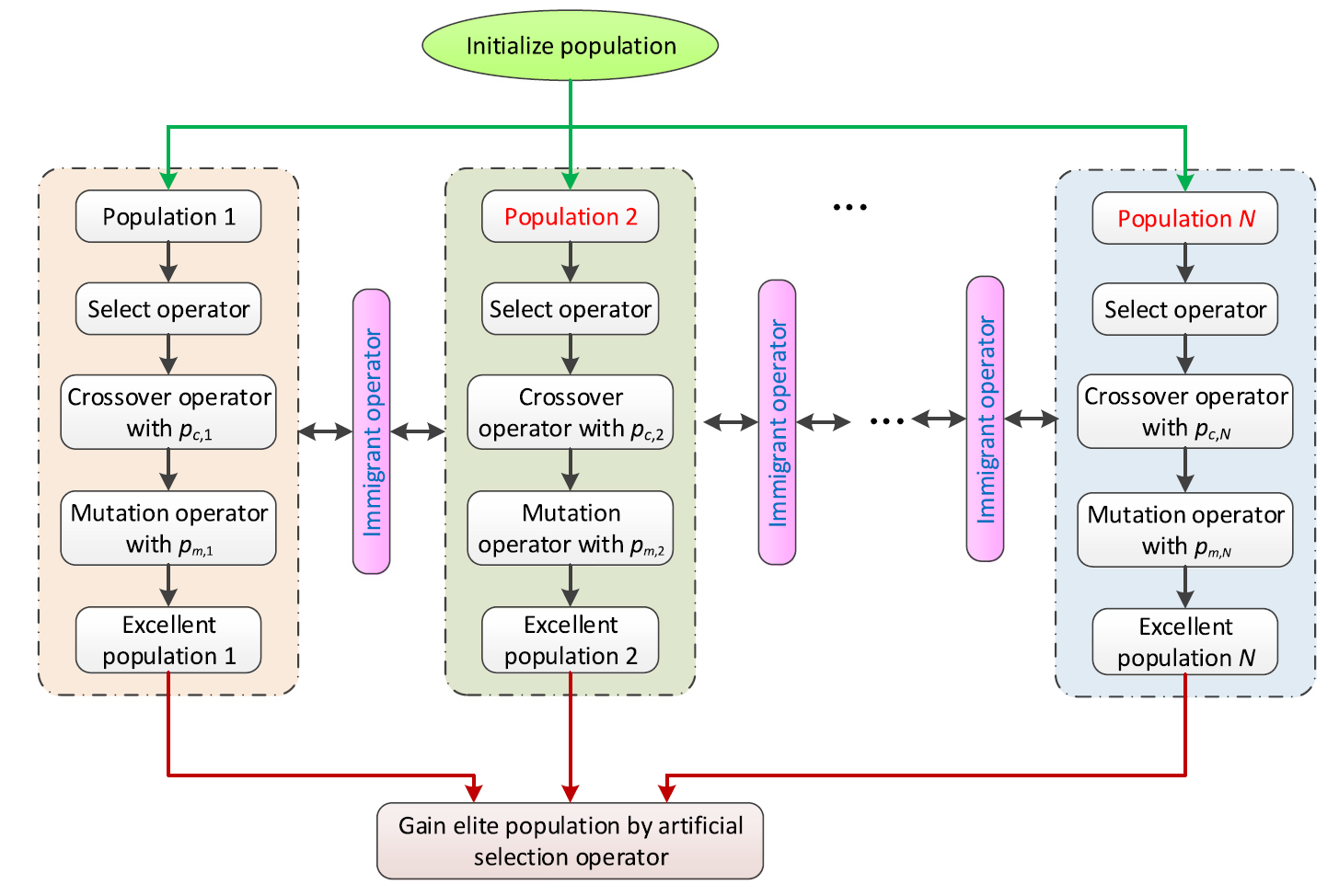
图2:广义回归神经网络模型示意图 图3:改进多种群遗传算法结构
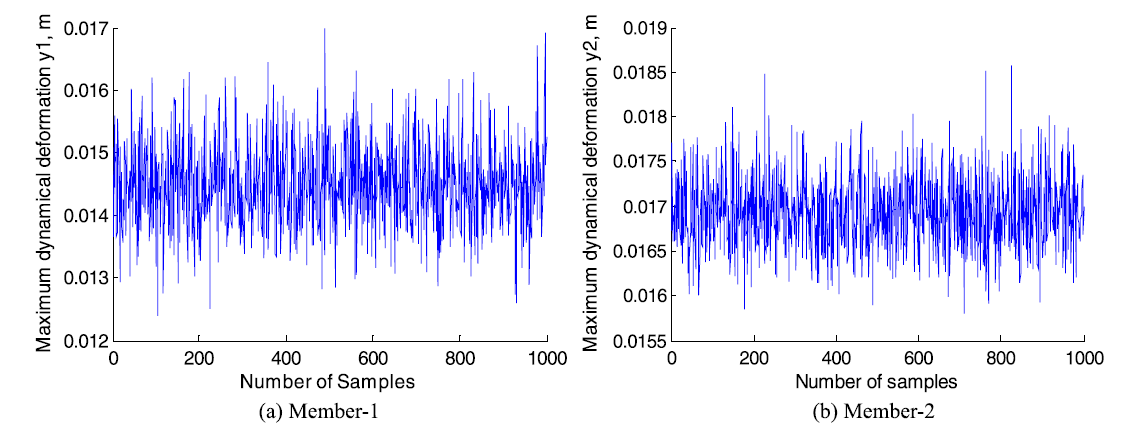
图4:TFRM构件变形概率仿真
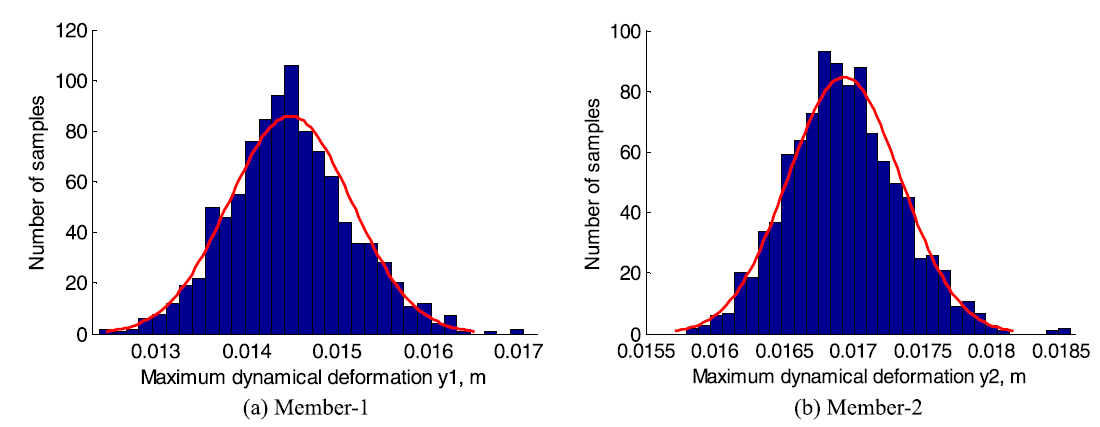
图5:TFRM构件变形的概率分布
该研究由复旦大学航空航天系费成巍课题组主要完成,参与者有费成巍青年研究员、博士后路成博士和韩雷博士、李桓和刘皓天硕士研究生,还有赵拥军研究员,复旦大学为第一单位,参与单位为华北电力大学。研究得到由国家自然科学基金(批准号51975124和51675179)、复旦大学引进人才启动经费和上海市“一带一路”项目(批准号:20110741700)共同资助。
原文链接:
https://www.sciencedirect.com/science/article/pii/S1270963820310245?dgcid=author