航空母舰是现代战争中的重要角色,舰载机是现代航母编队打击能力的重要组成部分。在无人机诞生后,舰载无人机一直是热点话题之一,航空母舰装备无人舰载机已经是一种必然趋势。但是,受限于有限的甲板空间和复杂的海面环境,舰载机着舰,特别是舰载无人机的自主着舰,一直被视为一项十分重要但很有挑战性的任务。同时,在复杂和高度敌对的环境下产生的故障也会严重影响舰载无人机的着舰安全。
近期,复旦大学航空航天系艾剑良教授自主飞行与控制团队提出了基于L1自适应动态逆控制(L1 adaptive nonlinear dynamic inversion control, L1ANDI)方法的舰载无人机自动着舰控制系统(automatic landing control system, ALCS),研究了舰载无人机在执行器故障和结构性故障下的安全着舰问题,相关成果以“Fault-tolerant control method for carrier landing with actuator and structural faults”为题目发表在航空航天工程领域国际知名期刊《Aerospace Science and Technology》上。

飞行器飞行控制系统的典型故障类型可以分类为传感器故障、执行器(操纵舵面)故障和结构性故障。其中,传感器故障会导致采集到的飞行数据丢失或不准确,可以设计冗余传感器组降低其影响;执行器故障直接影响飞行控制能力;结构性故障意味着物理结构中的故障,通常很难解决。现有研究主要聚焦舰载无人机无故障情况下的精准着舰控制问题和执行器故障下的容错着舰控制问题,缺少对着舰过程中舰载无人机发生结构性故障的机理分析。针对这一研究空白,研究人员提出了一种考虑飞行器执行器故障和结构性故障的舰载无人机着舰控制仿真框架。
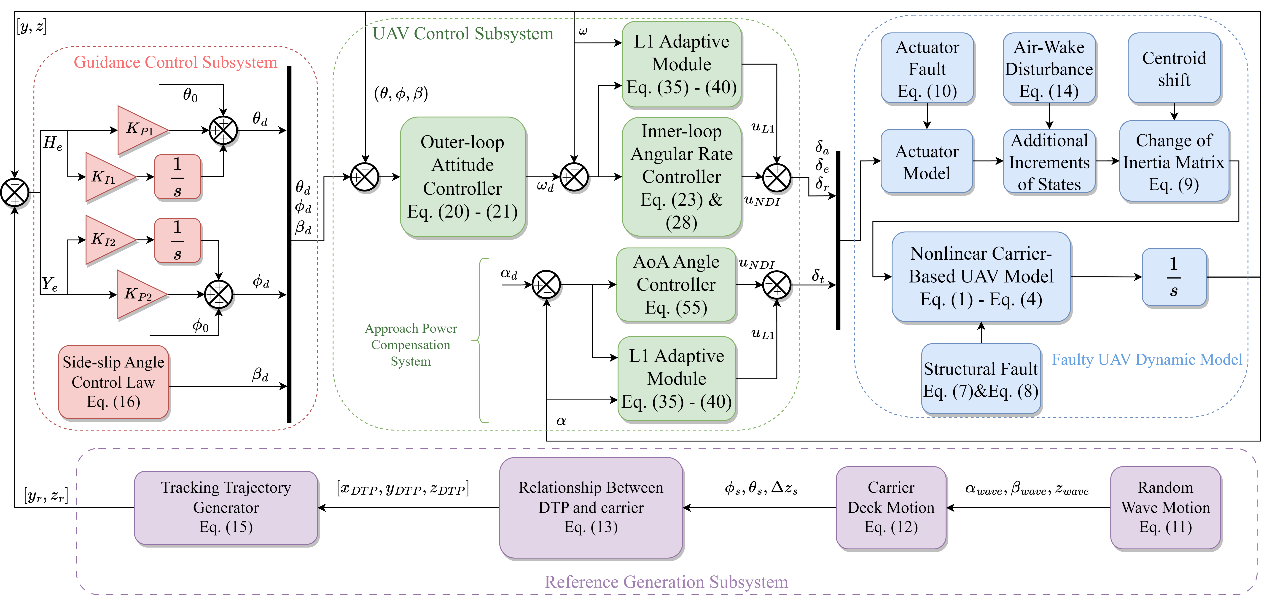
图1 舰载无人机着舰控制仿真框架
该研究进一步提出了一种基于L1自适应动态逆控制方法的自动着舰控制系统。通过时标分离原理将系统状态分为快变量和慢变量,分别设计了内环角速率控制器和外环角度控制器。为解决动态逆(Nonlinear dynamic inversion, NDI)控制方法的弱鲁棒性问题,基于L1自适应控制(L1 adaptive control)原理设计了L1自适应模块,该模块包括状态预测器、自适应律和L1控制律。状态预测器和被控对象具有一致的数学表达;自适应律估计不确定参数,并保证误差方程在Lyapunov意义下稳定;L1控制律中设计低通滤波器,实现控制律和自适应律设计的分离。通过Lyapunov方法证明了该闭环系统的稳定性,其跟踪误差有界。
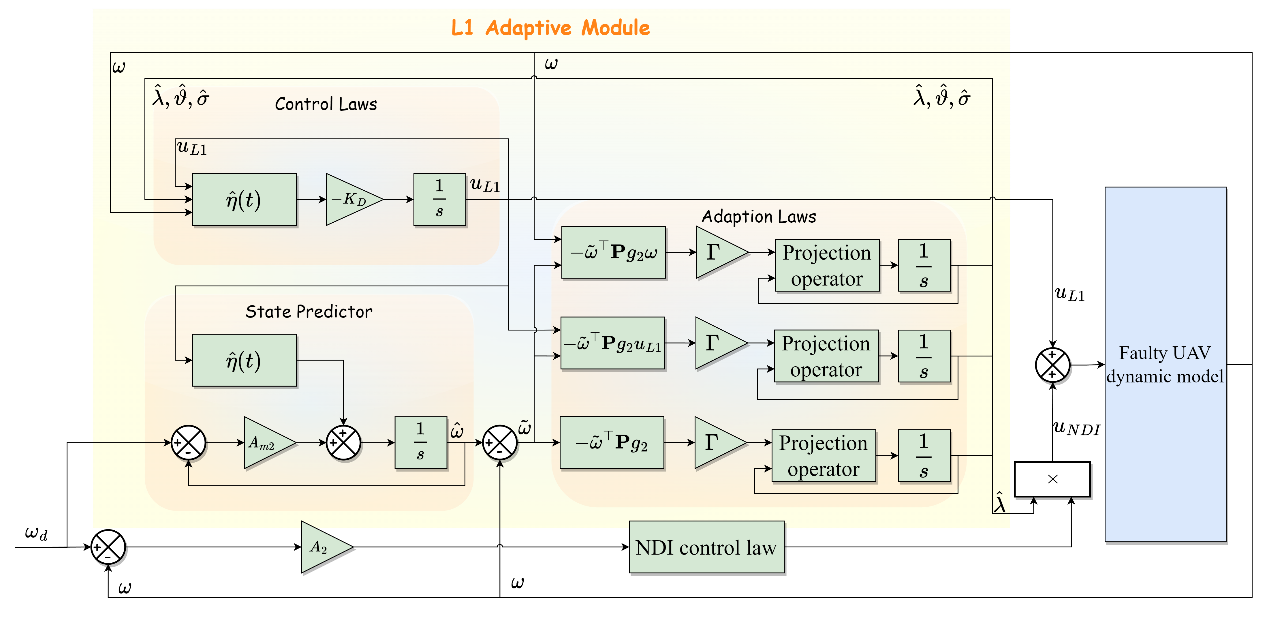
图2 L1ANDI控制方法系统框图
仿真实验结果显示,L1ANDI方法在保留NDI方法对已知非线性的快速解耦处理能力的同时,所引入的L1自适应模块能够有效处理执行器故障和结构性故障引起的模型不确定性。与基于NDI和基于L1自适应控制的ALCS相比,基于L1ANDI的ALCS在持续外部干扰和复杂内部故障情况下表现出优异的鲁棒性和快速自适应能力,能够保证舰载无人机故障情况下的安全着舰控制。

图3 复合故障下舰载无人机着舰过程中的状态响应:(a)迎角;(b)俯仰角;(c)滚转角;(d)侧滑角
复旦大学航空航天系博士生王衡为论文的第一作者,艾剑良教授是论文的通讯作者,博士生段博文是论文的合作者。该研究得到了国家有关研究项目的支持。
论文链接:https://doi.org/10.1016/j.ast.2024.109872