无人机技术历经数十年的迭代发展,目前已达到高度成熟阶段。但在未来战争中,单架无人机难以自主应对复杂战场环境,无法满足多任务和多目标的攻击需求。而无人机编队协同控制不仅能有效提升系统的灵活性和任务执行效率,还能通过多智能体系统的协调,解决单一无人机难以应对的复杂环境和任务。然而,编队保持和避障控制一直是编队飞行研究中的基本挑战。同时,复杂三维动态环境也会严重威胁编队的飞行安全。
近期,复旦大学航空航天系艾剑良教授自主飞行与控制团队提出了基于自适应因子模糊控制(adaptive factor fuzzy control, AFFC)方法的无人机编队飞行控制系统(formation flight control system, FFCS),研究了无人机编队在复杂三维动态环境下的队形保持和避障问题,相关成果以“Adaptive Factor Fuzzy Controller for Keeping Multi-UAV Formation While Avoiding Dynamic Obstacles”为题目发表在航空航天工程领域国际知名期刊《Drones》上。
队形变换能够使编队适应不同任务需求,提高编队系统的适应性和灵活性;同时,避障则是确保编队系统能够安全、高效地在动态环境中运行的关键。在传统模糊控制策略的框架内,量化因子和比例因子的选取上既耗时又费力,参数通用性不强,当遭遇较强的外部干扰时,预先设定的量化及比例因子参数很可能失去其有效性,无法确保控制系统性能的最优化。现有研究主要聚焦编队模糊控制方法在不同场景下的应用问题,缺少对控制参数自适应调节功能的研究。针对这一研究空白,研究人员提出了一种考虑控制参数自适应调节功能的编队自适应因子模糊控制结构。
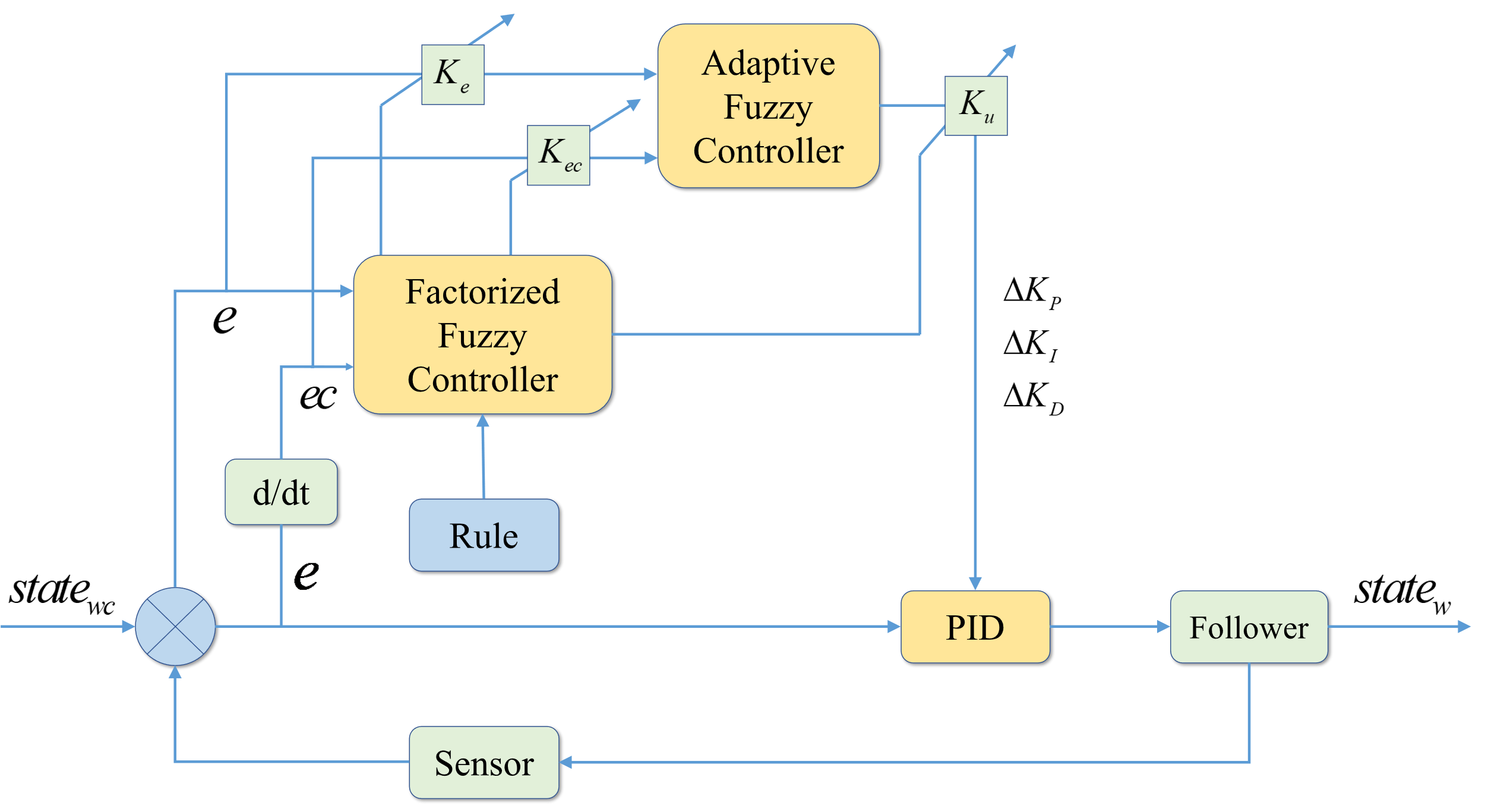
图 1 编队自适应因子模糊控制结构
该研究还基于斥力势函数改进了人工势场法以克服人工势场法中的局部极小值问题。设计的改进型斥力势函数与传统的斥力势函数相比多了n次项和e的幂指数项。 n次项能够改变飞行过程中无人机的势场值,并且调节到达目标点时的无人机势场值趋于最小;e的幂指数项控制着随无人机与障碍物的距离增加而迅速减小的权重,这可以使斥力场的影响会随着距离的增加而逐渐减小,避免无人机在遥远的地方过度调整方向。由于在斥力势函数设计中引入斥力可调参数和衰减率动态调整参数,能够调节无人机到达目标点时的势场值以及飞行状态,提高了编队控制系统的避障能力。通过数学推理方法证明了该改进型人工势场法的有效性,其避障能力得到提升。
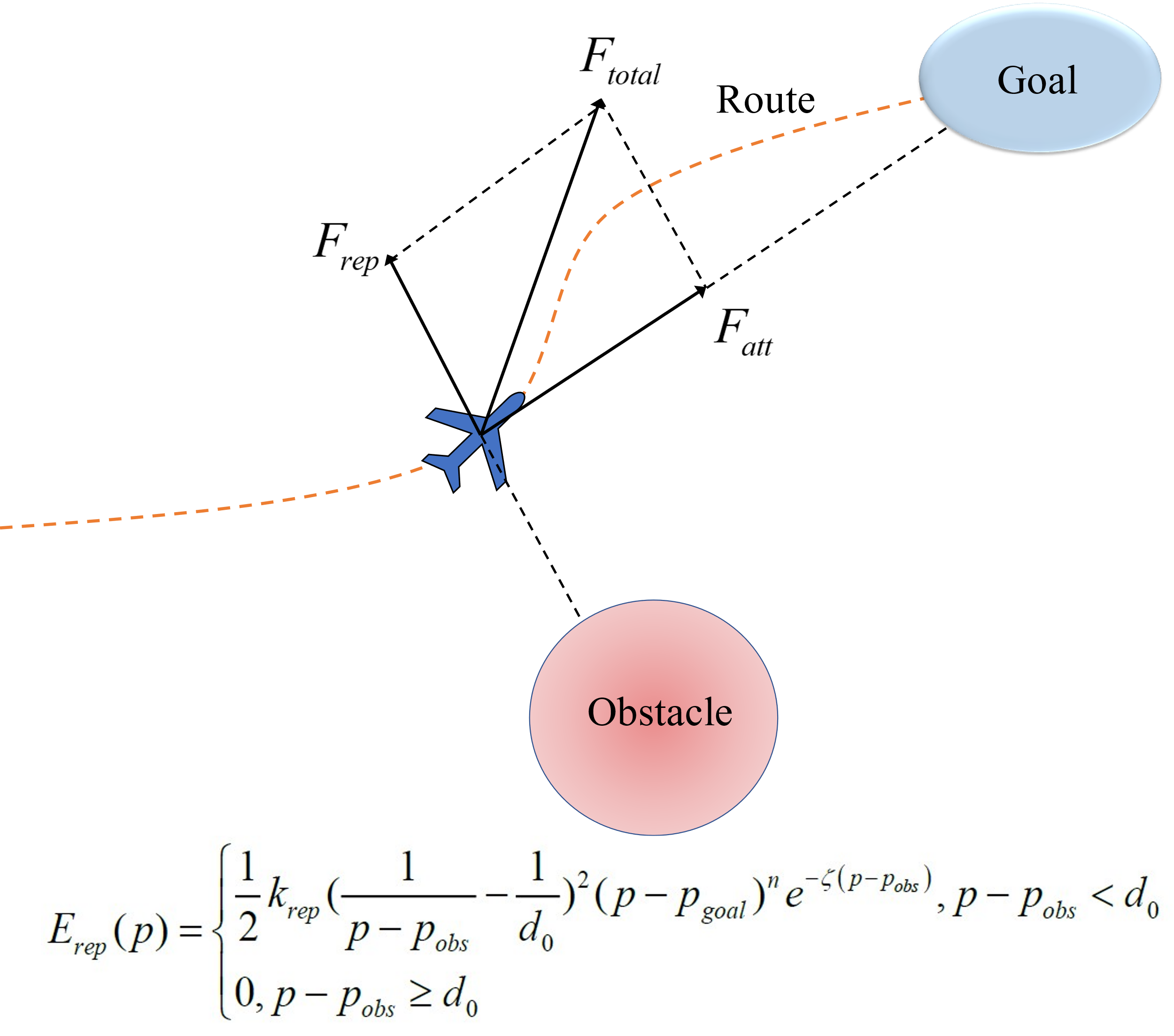
图 2 改进型人工势场法
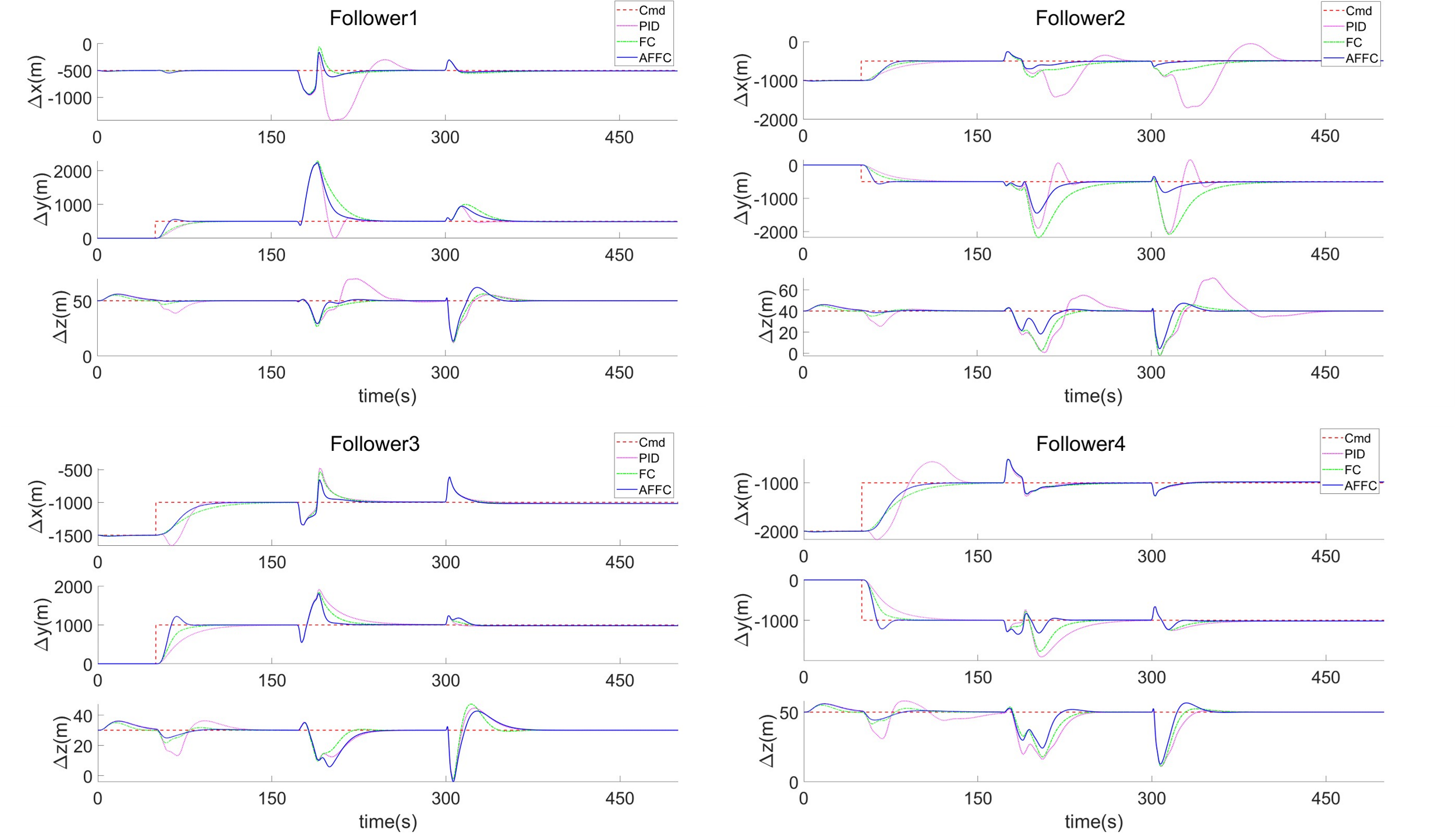
仿真实验结果显示,AFFC方法在保留模糊控制不依赖被控对象的精确数学模型,能够辅助PID参数的调节与整定的同时,所引入的自适应结构能够有效解决量化因子与比例因子的选值问题。与基于FC和基于PID控制的FFCS相比,基于AFFC的FFCS在复杂三维动态环境干扰和编队间无人机避碰情况下表现出优异的鲁棒性和快速自适应能力,能够保证无人机编队在复杂环境下队形保持和避障控制。
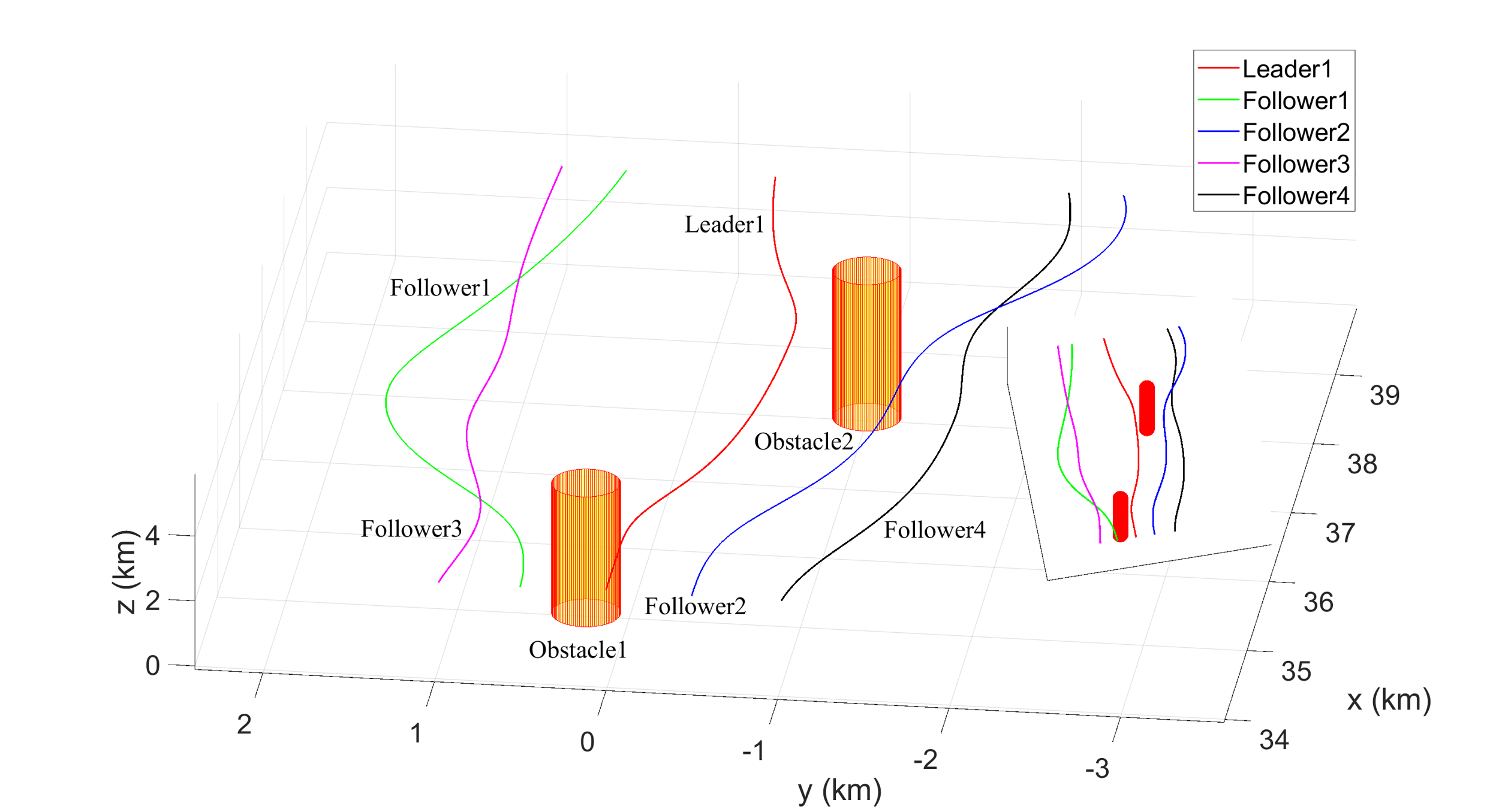
图 3 编队避障的三维飞行轨迹
复旦大学航空航天系博士生龚帮民为论文的第一作者,艾剑良教授是论文的通讯作者,博士生李一扬、张立是论文的合作者。该研究得到了国家有关研究项目的支持。
论文链接:https://doi.org/10.3390/drones8080344